本帖最后由 机器谱 于 2023-9-15 09:32 编辑
机器人的智能移动可应用于物流行业、交通行业,本节内容我们将利用键盘控制全向底盘运动完成slam建图,并能在已建好的地图里进行自主导航。
1. 键盘控制底盘运动
实现思路
按下键盘上指定的键,实现全向底盘前进、后退、转向、平移;还可以灵活的设置底盘的角速度、线速度来调整底盘的运动。下面是本实验中规划的控制全向底盘的键盘命令(如下表所示),大家可以先熟悉一下,稍后会在控制底盘时用到。
键盘命令及含义表
分类
| 运动指令
|
| 键盘快捷键
| 指令含义
| 基本运动
| i
| 前进
| ,
| 后退
| j
| 左转
| l
| 右转
| 平移
| J
| 左平移
| L
| 右平移
| 调整角速度与线速度
| q
| 增大底盘最大速度的10%(包含角速度与线速度)
| z
| 减小底盘最大速度的10%(包含角速度与线速度)
| 调整线速度
| w
| 仅仅增大底盘线速度的10%
| x
| 仅仅减小底盘线速度的10%
| 调整角速度
| e
| 仅仅增大底盘角速度的10%
| c
| 仅仅减小底盘角速度的10%
|
| 除了上面按键之外的其它按键(如:k)
| 停止
|
| Ctrl+c
| 程序结束
|
操作步骤
① 下载文末资料中的参考程序fourmacnum_car_ws\src\Arduino_Program\black_handle_BaseCar\black_handle_BaseCar.ino: - /*------------------------------------------------------------------------------------
- 版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
- Distributed under MIT license.See file LICENSE for detail or copy at
- https://opensource.org/licenses/MIT
- by 机器谱 2023-08-22 https://www.robotway.com/
- ------------------------------*/
- //DUE控制版需要启用USE_USBON或USE_NATIVE_USB,UNO不需要
- //#define USE_USBCON //PAOGRAMMING PORT
- //#define USE_NATIVE_USB //NATIVE USB PORT
- #define ActionDelayTimes 1500
- //#include <SoftwareSerial.h>
- #include <ros.h>
- #include <ros/time.h>
- //#include<ServoTimer2.h>
- #include <geometry_msgs/Vector3.h>
- #define mySerial Serial2
- #define BusServoSerialBaud 115200
- ros::NodeHandle nh;
- void XYRun(double vx, double vy, double w);
- void messageCb( const geometry_msgs::Vector3& vel_cmd) {XYSetVel(vel_cmd.x, vel_cmd.y, vel_cmd.z);}
- ros::Subscriber<geometry_msgs::Vector3> vel_cmd_sub("vel_cmd", &messageCb );
- geometry_msgs::Vector3 pose_message;
- ros::Publisher pose_feedback_pub("pose_feedback",&pose_message);
- geometry_msgs::Vector3 vel_message;
- ros::Publisher vel_feedback_pub("vel_feedback",&vel_message);
- //ServoTimer2 myServo[4];//statement servo
- //int servo_port[4] = {10, 11, 12, 13};//x,y,z,a
- //float value_init[4] = {88, 88, 96, 86};//x,y,z,a
- const int kMessagePubRate = 5;
- unsigned long message_pub_time = 0;
- const int kReadMotorDeltaT = 5;
- unsigned long position_read_time = 0;
- float current_x = 0,current_y = 0,current_a = 0;
- float current_vx = 0,current_vy = 0,current_va = 0;
- float wheel_Speed[4]={0,0,0,0};
- char cmd_return[200];
- float sudu = 0.87;
- //SoftwareSerial mySerial(51, 9);
- void setup()
- {
- delay(1000);
- Serial.begin(57600);delay(1000);
- mySerial.begin(BusServoSerialBaud);delay(1000);
- //Servo_Action_Test();delay(1500);
- nh.initNode();
- nh.subscribe(vel_cmd_sub);
- nh.advertise(pose_feedback_pub);
- nh.advertise(vel_feedback_pub);
- XYSetVel(0.0,0.0,0.0);
- position_read_time = millis();
- message_pub_time = millis();
- }
- void loop()
- {
- // unsigned long times = millis();
- // set_Single_servo_Vel(1600);delay(5000);
- // Serial.println(millis()-times);
- // set_Single_servo_Vel(1500);
- // while(1){
- // delay(100);
- // }
- if(millis()>position_read_time)
- {
- XYread();
- position_read_time+=kReadMotorDeltaT;
- }
-
- if(millis()>message_pub_time)
- {
- pose_message.x = current_x;
- pose_message.y = current_y;
- pose_message.z = current_a;
- vel_message.x = current_vx;
- vel_message.y = current_vy;
- vel_message.z = current_va;
- pose_feedback_pub.publish(&pose_message);
- vel_feedback_pub.publish(&vel_message);
- message_pub_time+=1000.0/kMessagePubRate;
- }
- nh.spinOnce();
- }
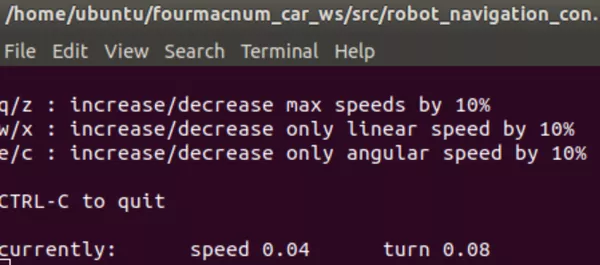
成功启动后,可以在终端看到底盘的当前speed(线速度)为0.04,turn(角速度)为0.08。 注意:speed指的是线速度的大小(包含方向),turn指的是角速度的大小(包含方向)。 启动后的界面(如下图所示): ③ 尝试按下键盘命令,控制底盘的运动。 (注意:请先保证终端是激活状态;按键盘时,稍微有点间隔,给底盘转动的时间)。 假如现在希望先增加底盘的最大速度,再降低底盘的最大速度,则分别按下键盘上q、z命令,则可以观察到终端的结果(如下图所示)。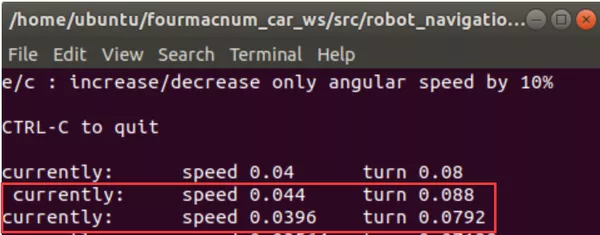 更多命令大家可自行尝试。 更多命令大家可自行尝试。
2. 底盘同步定位与建图-SLAM实现思路 利用Gmapping算法对底盘所在的未知环境进行建立地图、同步定位、最后保存此地图。此地图可供后续底盘导航使用。
器材准备 
① 下载文末资料中的参考程序fourmacnum_car_ws\src\Arduino_Program\black_handle_BaseCar\black_handle_BaseCar.ino: - /*------------------------------------------------------------------------------------
- 版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
- Distributed under MIT license.See file LICENSE for detail or copy at
- https://opensource.org/licenses/MIT
- by 机器谱 2023-08-22 https://www.robotway.com/
- ------------------------------*/
- //DUE控制版需要启用USE_USBON或USE_NATIVE_USB,UNO不需要
- //#define USE_USBCON //PAOGRAMMING PORT
- //#define USE_NATIVE_USB //NATIVE USB PORT
- #define ActionDelayTimes 1500
- //#include <SoftwareSerial.h>
- #include <ros.h>
- #include <ros/time.h>
- //#include<ServoTimer2.h>
- #include <geometry_msgs/Vector3.h>
- #define mySerial Serial2
- #define BusServoSerialBaud 115200
- ros::NodeHandle nh;
- void XYRun(double vx, double vy, double w);
- void messageCb( const geometry_msgs::Vector3& vel_cmd) {XYSetVel(vel_cmd.x, vel_cmd.y, vel_cmd.z);}
- ros::Subscriber<geometry_msgs::Vector3> vel_cmd_sub("vel_cmd", &messageCb );
- geometry_msgs::Vector3 pose_message;
- ros::Publisher pose_feedback_pub("pose_feedback",&pose_message);
- geometry_msgs::Vector3 vel_message;
- ros::Publisher vel_feedback_pub("vel_feedback",&vel_message);
- //ServoTimer2 myServo[4];//statement servo
- //int servo_port[4] = {10, 11, 12, 13};//x,y,z,a
- //float value_init[4] = {88, 88, 96, 86};//x,y,z,a
- const int kMessagePubRate = 5;
- unsigned long message_pub_time = 0;
- const int kReadMotorDeltaT = 5;
- unsigned long position_read_time = 0;
- float current_x = 0,current_y = 0,current_a = 0;
- float current_vx = 0,current_vy = 0,current_va = 0;
- float wheel_Speed[4]={0,0,0,0};
- char cmd_return[200];
- float sudu = 0.87;
- //SoftwareSerial mySerial(51, 9);
- void setup()
- {
- delay(1000);
- Serial.begin(57600);delay(1000);
- mySerial.begin(BusServoSerialBaud);delay(1000);
- //Servo_Action_Test();delay(1500);
- nh.initNode();
- nh.subscribe(vel_cmd_sub);
- nh.advertise(pose_feedback_pub);
- nh.advertise(vel_feedback_pub);
- XYSetVel(0.0,0.0,0.0);
- position_read_time = millis();
- message_pub_time = millis();
- }
- void loop()
- {
- // unsigned long times = millis();
- // set_Single_servo_Vel(1600);delay(5000);
- // Serial.println(millis()-times);
- // set_Single_servo_Vel(1500);
- // while(1){
- // delay(100);
- // }
- if(millis()>position_read_time)
- {
- XYread();
- position_read_time+=kReadMotorDeltaT;
- }
-
- if(millis()>message_pub_time)
- {
- pose_message.x = current_x;
- pose_message.y = current_y;
- pose_message.z = current_a;
- vel_message.x = current_vx;
- vel_message.y = current_vy;
- vel_message.z = current_va;
- pose_feedback_pub.publish(&pose_message);
- vel_feedback_pub.publish(&vel_message);
- message_pub_time+=1000.0/kMessagePubRate;
- }
- nh.spinOnce();
- }
打开终端并输入命令:roslaunch robot_navigation_control robot_car.launch,见下图。
③ 启动构建地图服务。
重新打开新终端并输入:roslaunch four_macnum_slam four_macnum_slam.launch,见下图。
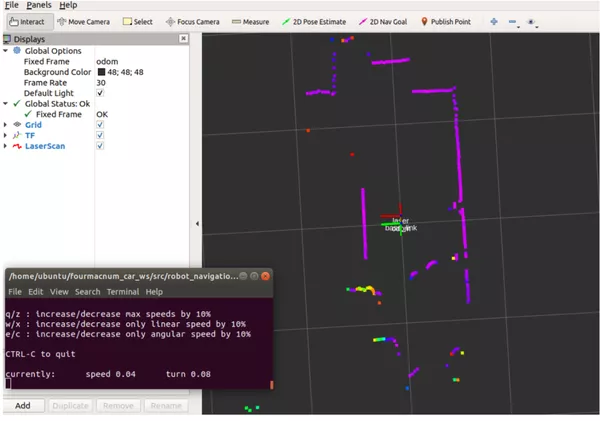
界面启动后,在rviz中选择“map”,可以在可视化界面看到有地图出现。
下面根据实际环境进行建图:按下键盘相关指令(键盘指令请参考上述内容--键盘命令及含义表)来控制全向底盘在场地内遍地运行,直至在Rviz内可以看到构建地图的轮廓,如下图所示(注意实际地图环境不同,出现的轮廓也会不同)。
底盘在未知环境中建立地图
④ 为了后续在已知环境中运行底盘,需把此次建立的地图进行保存。需要先进入保存地图的文件夹,然后给地图命名,保存即可。
下面是实验中的具体操作:
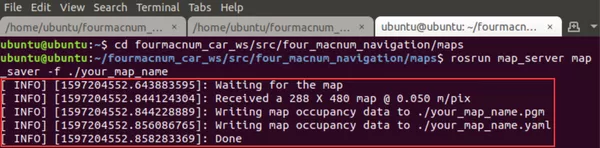
重新打开新终端(ctrl+shift+t)并输入:cd fourmacnum_car_ws/src/four_macnum_navigation/maps
之后输入:rosrun map_server map_saver -f ./your_map_name
返回下图红色框的信息,代表成功保存地图。
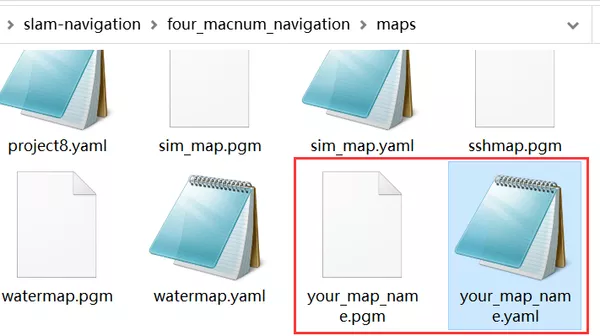
查看生成的地图文件
上面我们用map_server来保存地图,这里我们来简单了解和查看一下刚才保存的地图文件(见下图)。其中:map_server是一个和地图相关的功能包,它可以将已知地图发布出来,供导航和其它功能使用,也可以保存SLAM建立的地图。
地图文件,通常为pgm格式
地图的描述文件,通常为yaml格式
打开your_map_name.pgm(见下图):
打开your_map_name.yaml ,各个参数如下图所示:
其中占据的概率 occ = (255-color_avg)/255.0,color_avg为RGB三个通道的平均值。
3. 底盘导航—Navigation
实现思路
加载上述实验中建好的地图,全向底盘进行姿态估计并实现导航效果。
操作步骤
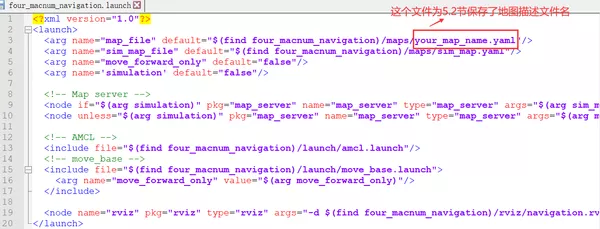
① 将创建的地图应用到导航程序中。这里我们需要修改下four_macnum_navigation.launch文件,将your_map_name.yaml 添加到此launch文件中。步骤如下:
打开终端并输入:cd fourmacnum_car_ws/src/four_macnum_navigation/launch
之后再输入:gedit four_macnum_navigation.launch
② 启动雷达、键盘、rosserial。
在该终端继续输入:roslaunch robot_navigation_control test_one.launch
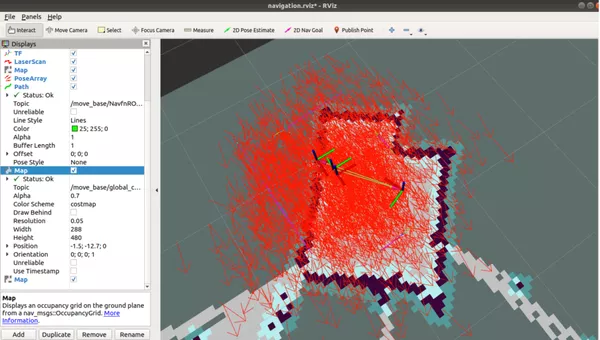
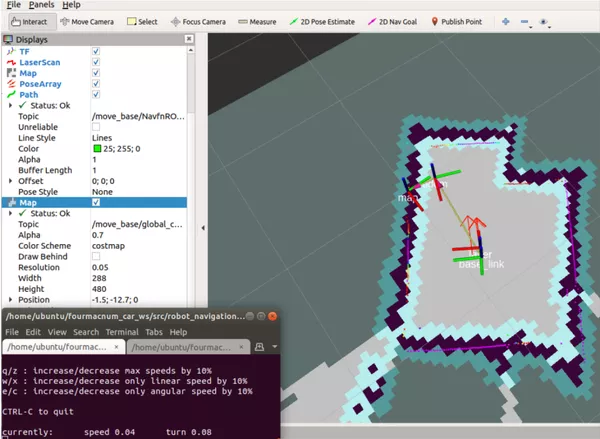
③ 打开新终端并输入:roslaunch four_macnum_navigation four_macnum_navigation.launch(见下图)。
启动界面后,可以看到许多红色的箭头,这代表底盘的姿态估计还不准确。
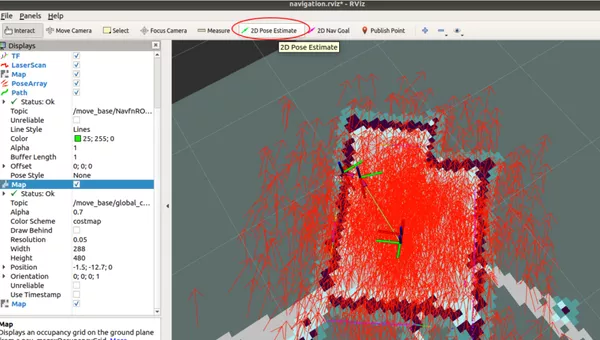
④ 开始调整底盘的姿态。
使用2D Pose Estimate 标定底盘位于地图中的初始位置及车头指向(见下图)。
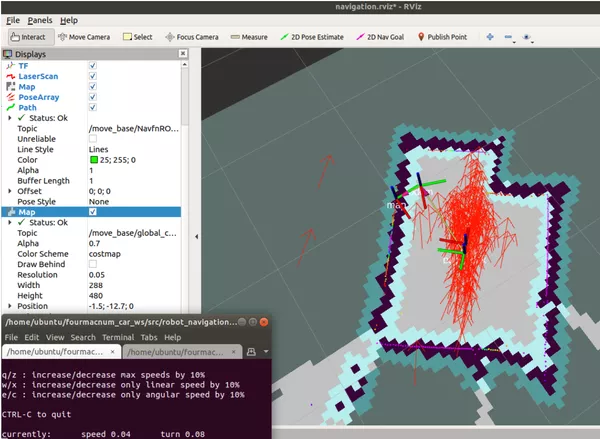
⑤ 鼠标点击有roslaunch robot_navigation_control test_one.launch的终端后,尝试按下键盘命令控制全向底盘运动(键盘指令请参考上述内容--键盘命令及含义表),最好尽可能多的消除地图中的箭头【这一步作用是确定底盘在地图中的实际位置以及车头指向】。
下面是多次按下键盘命令控制底盘运动后,箭头逐渐减少的效果。
下图是最后调整完的底盘姿态(即底盘在地图中的实际位置以及车头指向)。
⑥ 尝试给定全向底盘目标位置。
【使用2D Nav Goal】,这里的目标位置包含了目标点及车头指向,在可视化界面点击且转动箭头防线,机器人会移动到指定点的位置。
4. 资料下载
资料内容:程序源代码
资料下载地址:桌面级全向底盘-slam导航 https://www.robotway.com/h-col-260.html
|


 发表于 2023-9-15 09:32:01
发表于 2023-9-15 09:32:01