本帖最后由 机器谱 于 2023-4-11 10:18 编辑
1. 功能说明
本文示例将实现R311样机双轴XY平台绘制正弦曲线的功能。
2. 电子硬件
在这个示例中,采用了以下硬件,请大家参考:
| 主控板 | Basra主控板(兼容Arduino Uno) | | 扩展板 | Bigfish2.1扩展板 | SH-ST步进电机扩展板 | | 电池 | 11.1V动力电池 | | 传感器 | 触碰传感器 | 其它
| 笔架×1(自制)
|
3. 功能实现
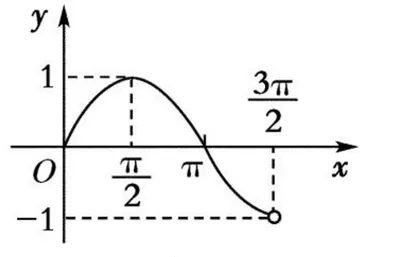
绘制正弦曲线同样采用建立坐标系,确定特殊点坐标,利用插补法来完成坐标路径绘制。
正弦曲线:
3.1硬件连接
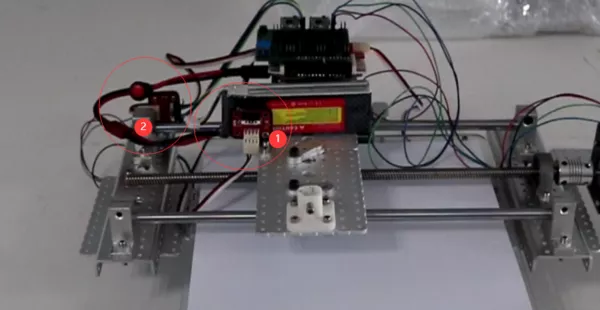
按下图所示,在双轴XY平台的①和②位置安装两个触碰传感器,用作开关限位器:
电路连接说明:
① 步进电机:
X轴黑绿红蓝 Y轴黑绿红蓝
② 触碰传感器3个↓
X方向复位传感器引脚:A4
y方向复位传感器引脚:A0
电机运动的触发传感器引脚:A2
3.2 示例程序
编程环境:Arduino 1.8.19
下面提供一个正弦函数为 的参考例程(_3_sin.ino),尝试读懂程序,绘制不同参数的正弦曲线: 的参考例程(_3_sin.ino),尝试读懂程序,绘制不同参数的正弦曲线:
- /*------------------------------------------------------------------------------------
- 版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
- Distributed under MIT license.See file LICENSE for detail or copy at
- https://opensource.org/licenses/MIT
- by 机器谱 2023-03-27 https://www.robotway.com/
- ------------------------------*/
- #define EN 8 //步进电机使能端,低电平有效
- #define X_DIR 5 //X轴 步进电机方向控制
- #define Y_DIR 6 //y轴 步进电机方向控制
- #define X_STP 2 //x轴 步进控制
- #define Y_STP 3 //y轴 步进控制
- boolean DIR; //boolean类型变量 DIR,控制步进电机方向,true为正向,false为反向,根据接线做调整
- int stepper_delay = 40; //定义步进电机脉冲发送的时间间隔
- const int SENSOR_X = 18; //定义X方向复位传感器引脚
- const int SENSOR_Y = 14; //定义y方向复位传感器引脚
- const int SENSOR_TOUCH = 16; //定义电机运动的触发传感器引脚
- const int stepsPerRevolution = 3200; //定义步进电机每圈转动的步数,细分为16
- float LEAD = 0.8; //定义丝杠导程,即步进电机转动一圈,丝杠前进8cm
- float A = 2.0; //定义sin函数振幅
- float W = 1.0; //定义sin函数角频率
- float P = 0.0; //定义sin函数初始相位
- float Xmin = 0;
- float Ymin = 0;
- float Xpos = Xmin;
- float Ypos = Ymin;
- void setup()
- {
- Serial.begin(9600); //开启串口通信,波特率为9600
- pinMode(X_DIR, OUTPUT); pinMode(X_STP, OUTPUT);
- pinMode(Y_DIR, OUTPUT); pinMode(Y_STP, OUTPUT);
- pinMode(EN, OUTPUT);
- digitalWrite(EN, LOW);
- resetStepper();
- }
- void loop()
- {
- while(digitalRead(SENSOR_TOUCH))
- delay(10);
-
- Xpos = 0;
- Ypos = 0;
-
- step(Y_DIR,Y_STP,-40000);
- //step(X_DIR, X_STP, 28000);
-
- for(float x=0;x<=2*PI/W;x+=0.1)
- {
- float y = A*sin(W*x+P);
- drawLine(x,y);
- }
-
- step(X_DIR, X_STP, 8000);
-
- resetStepper();
- }
- //图形绘制函数,参数为点坐标值
- void drawLine(float x1, float y1)
- {
- int dx, dy, n, k, i, f, stepInc;
- x1 = (int)(x1/LEAD*stepsPerRevolution);
- y1 = (int)(y1/LEAD*stepsPerRevolution);
- float x0 = Xpos;
- float y0 = Ypos;
-
- Serial.println(Xpos);
- Serial.println(Ypos);
-
- dx = abs(x1-x0);
- dy = abs(y1-y0);
- n = abs(dx+dy);
- if(dx==0||dy==0)
- {
- stepper_delay = 40;
- stepInc = 10;
- }
- else
- {
- stepper_delay = 200;
- stepInc = 100;
- }
-
- if(x1 >= x0)
- {
- k = y1 >= y0 ? 1:4;
- }
- else
- {
- k = y1 >= y0 ? 2:3;
- }
-
- for(i=0,f=0;i<n;i+=stepInc)
- {
- if(f>=0)
- {
- switch(k)
- {
- case 1:
- step(X_DIR, X_STP, stepInc);
- f = f - dy;
- //Serial.println("+x");
- break;
- case 2:
- step(X_DIR, X_STP, -stepInc);
- f = f - dy;
- //Serial.println("-x");
- break;
- case 3:
- step(X_DIR, X_STP, -stepInc);
- f = f - dy;
- //Serial.println("-x");
- break;
- case 4:
- step(X_DIR, X_STP, stepInc);
- f = f - dy;
- //Serial.println("+x");
- break;
- default:break;
- }
- }
- else
- {
- switch(k)
- {
- case 1:
- step(Y_DIR, Y_STP, stepInc);
- f = f + dx;
- //Serial.println("+y");
- break;
- case 2:
- step(Y_DIR, Y_STP, stepInc);
- f = f + dx;
- //Serial.println("+y");
- break;
- case 3:
- step(Y_DIR, Y_STP, -stepInc);
- f = f + dx;
- //Serial.println("-y");
- break;
- case 4:
- step(Y_DIR, Y_STP, -stepInc);
- f = f +dx;
- //Serial.println("-y");
- break;
- default:break;
- }
- }
- }
- Xpos = x1;
- Ypos = y1;
- }
- /*
- //函数:step 功能:控制步进电机方向,步数。
- //参数:dirPin对应步进电机的DIR引脚,stepperPin 对应步进电机的step引脚, steps 步进的步数
- //无返回值
- */
- void step(byte dirPin, byte stepperPin, int steps)
- {
- boolean DIR = steps>0 ? true : false;
- digitalWrite(dirPin,DIR);
- for(int i=0;i<abs(steps); i++)
- {
- digitalWrite(stepperPin, HIGH);
- delayMicroseconds(stepper_delay);
- digitalWrite(stepperPin, LOW);
- delayMicroseconds(stepper_delay);
- }
- }
- //步进电机复位函数
- void resetStepper()
- {
- stepper_delay = 40;
- while(digitalRead(SENSOR_X))
- step(X_DIR,X_STP,-10);
- step(X_DIR,X_STP,15);
- while(digitalRead(SENSOR_Y))
- step(Y_DIR,Y_STP,-10);
- step(Y_DIR,Y_STP,15);
- }
4. 资料下载
资料内容:绘制正弦曲线-例程源代码
资料下载地址:https://www.robotway.com/h-col-201.html
想了解更多机器人开源项目资料请关注 机器谱网站 https://www.robotway.com
|


 发表于 2023-4-11 10:18:07
发表于 2023-4-11 10:18:07