本帖最后由 机器谱 于 2023-7-14 13:04 编辑
1. 功能说明
本文示例将通过程序控制模拟立体仓储系统的运动效果--模拟立体仓储系统进行运输货物时各个结构的运动方式。立体仓储系统的运动有整体系统的水平移动、载货台的纵向移动、货叉的平动,所有的运动表现形式都是旋转运动转化为平动。
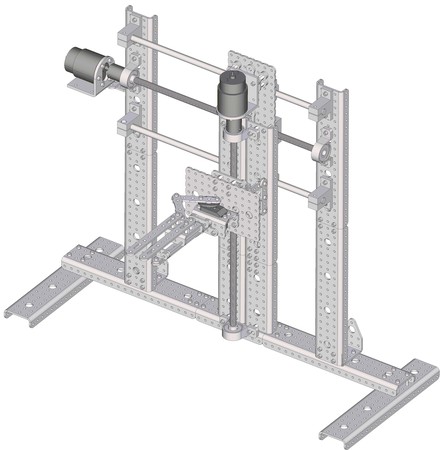
2. 结构说明
该立体仓储系统的水平移动使用丝杠平移,丝杠平移可以承载较重的物体;载货台的纵向移动使用丝杠平移,其稳定性较强,位移距离长;货叉的平动使用滑块平移机构,平移距离较短。
3. 电子硬件
本实验中采用了以下硬件:
主控板
| Basra控制板(兼容Arduino Uno) | 扩展板
| Bigfish2.1扩展板 | 传感器
| 触碰传感器 | 电池
| 7.4v锂电池 |
电路连接说明:在下图所示的2个位置分别安装一个触碰传感器作为限位(限位:限定机械设备的运动极限位置)。
① 2个触碰传感器分别连接在Bigfish扩展板的A0、A4端口;
② 舵机连接在Bigfish扩展板的D4端口;
③ 2个电机分别连在Bigfish扩展板的D5,D6接口和D9,D10接口。
4. 功能实现
4.1 实现思路
实现模拟立体仓储系统运输一个物体的功能。
初始位置:整体立体仓库的运输机构沿-X向移动到极限位置(2号电机控制,传感器限位);载货台沿-Z向移动到极限位置(1号电机控制,传感器限位);货叉收回(3号舵机角度控制);
装货:货叉伸出去,停顿(3号舵机角度控制,大概延迟0.3s);货叉收回,停顿(3号舵机角度控制,大概延迟0.3s);
运输:载货台沿+X向移动到中间位置(2号电机控制,运动所需延迟时间大概7s);载物台沿+Z向移动到中间位置(1号电机控制,运动所需延迟时间大概7s);
卸货:货叉伸出去,停顿(3号舵机角度控制,大概延迟0.3s);货叉收回,停顿(3号舵机角度控制,大概延迟0.3s);
复位:整体立体仓库的运输机构沿-X向移动到极限位置(2号电机控制,传感器限位);载货台沿-Z向移动到极限位置(1号电机控制,传感器限位);货叉收回(3号舵机角度控制)。
4.2 示例程序
编程环境:Arduino 1.8.19
下面提供一个参考例程(smartStoreHouse.ino),具体实验效果可参考演示视频。
- /*------------------------------------------------------------------------------------
- 版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
- Distributed under MIT license.See file LICENSE for detail or copy at
- https://opensource.org/licenses/MIT
- by 机器谱 2023-06-15 https://www.robotway.com/
- ------------------------------*/
- int sensor[4]= {A0,A2,A4,A3}; //定义数组~传感器接口
- /* 宏定义舵机角度,以及延时时间 */
- #define SERVO_OUT 70
- #define SERVO_IN 120
- #define Delay_right 7000
- #define Delay_up 7000
- #include <Servo.h>
- Servo myservo;
- void setup() {
- // put your setup code here, to run once:
- for(int i=0;i<4;i++) //传感器接口设置为输入
- pinMode(sensor[i],INPUT_PULLUP);
- /* 电机接口设置为输出*/
- pinMode(9, OUTPUT);
- pinMode(10, OUTPUT);
- pinMode(11, OUTPUT);
- pinMode(12, OUTPUT);
- pinMode(5, OUTPUT);
- pinMode(6, OUTPUT);
- Serial.begin(9600); //串口初始化
- myservo.attach(4);
- myservo.write(SERVO_IN); // 3号舵机收回来
- delay(300);
- motorReset(); // 电机初始化,回到复位位置
-
- }
- void loop()
- {
- myservo.write(SERVO_OUT); // 3号舵机伸出去
- delay(300);
- myservo.write(SERVO_IN); // 3号舵机收回来
- delay(300);
- X_Motor_right(); // 2 号电机右移 Delay_right时间,然后停止
- delay(Delay_right);
- X_Motor_stop();
- Y_Motor_up(); // 1号电机上移 Delay_up时间,然后停止
- delay(Delay_up);
- Y_Motor_stop();
- myservo.write(SERVO_OUT); // 3号舵机伸出去
- delay(300);
- myservo.write(SERVO_IN); // 3号舵机收回来
- delay(300);
- motorReset(); // 电机初始化,回到复位位置
-
- }
- /***************************** MOTOR **************************************/
- void X_Motor_left()
- {
- digitalWrite(5,LOW);
- digitalWrite(6,HIGH);
- }
- void X_Motor_right()
- {
- digitalWrite(5,HIGH);
- digitalWrite(6,LOW);
- }
- void X_Motor_stop()
- {
- digitalWrite(5,LOW);
- digitalWrite(6,LOW);
- }
- void Y_Motor_up()
- {
- digitalWrite(9,HIGH);
- digitalWrite(10,LOW);
- }
- void Y_Motor_down()
- {
- digitalWrite(9,LOW);
- digitalWrite(10,HIGH);
- }
- void Y_Motor_stop()
- {
- digitalWrite(9,LOW);
- digitalWrite(10,LOW);
- }
- void motorReset(){
- while(!SensorTrigger(0)) //A0传感器不触发,2号电机左移
- {
- X_Motor_left();
- Serial.print("A0: ");
- Serial.println(digitalRead(A0));
- }
- X_Motor_stop(); //A0传感器触发,2号电机停止
- while(!SensorTrigger(2))//A4传感器不触发,1号电机向下移动
- {
- Y_Motor_down();
- Serial.print("A4: ");
- Serial.println(digitalRead(A4));
- }
- Y_Motor_up();//A0传感器触发,2号电机向上300ms,然后停止
- delay(300);
- Y_Motor_stop();
- }
- /***********************************************************************************/
- boolean SensorTrigger( int which )
- {
- boolean where = false;
- if( !digitalRead( sensor[ which ] ) )
- {
- delay( 100 );
- if( !digitalRead( sensor[ which ] ) ) where = true;
- }
- return( where );
- }
5. 资料下载
资料内容:
①程序源代码
②样机3D文件
资料下载地址:智能立体仓储系统模型 https://www.robotway.com/sys-nd/12.html
|


 发表于 2023-7-14 13:04:35
发表于 2023-7-14 13:04:35