|
大家好啊,真心感谢又这样一个学习交流的平台
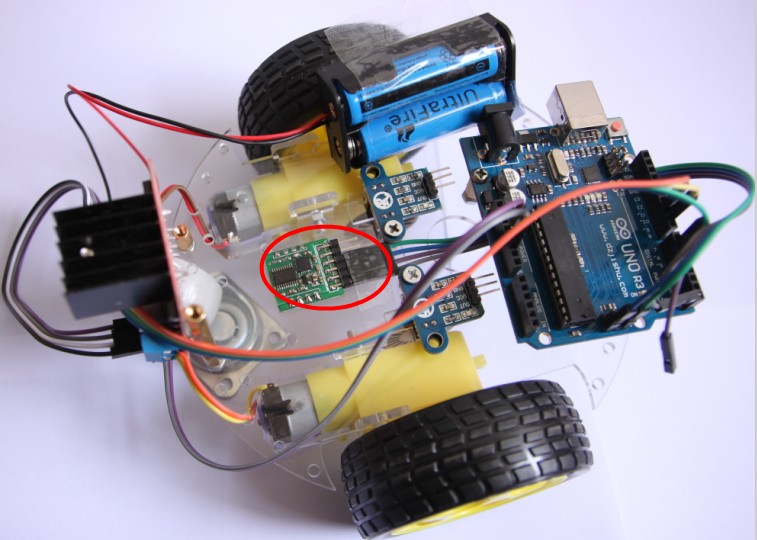
才开始学习Arduino没多久,准备做一个自平衡车,
但是和论坛里面前辈制作的自平衡车有一定差别
设想的是小车运动方向和平衡机制调节方向垂直
用MPU6050得到相应的值来对应控制舵机
制作的进程随着MPU6050 的引入而开始卡壳了
在论坛里面翻了很多关于MPU6050的帖子
但是自己对MPU6050模块的使用不太理解
主要是因为:
在前期的学习中,感觉很多模块像温度传感器这些都是直接读取数据,但是看到关于MPU6050的代码都是一大篇一大篇的。
想请教的是mpu6050可以直接输出其最开始测量的数值吗?大篇幅的代码是因为转换单位,IIC协议(其实这个也不太懂) ,还有滤波运算造成的吗?
在购入模块的时候,买了两种mpu6050模块,一种是10多元的,还有一种是最近论坛上也比较火热自带卡尔曼滤波的mpu6050。
那么这两种又有什么区别呢?我自己的想法是,后者将滤波的计算集成在mpu6050,可以直接输出经过转换计算后加速度和角速度值,所以就是说在代码中就可以不用加入积分滤波等一些列计算了吗?
万分感激!
|  [复制链接]
[复制链接]


 发表于 2013-11-14 20:07:24
发表于 2013-11-14 20:07:24


 有点问题的感觉~~~
有点问题的感觉~~~